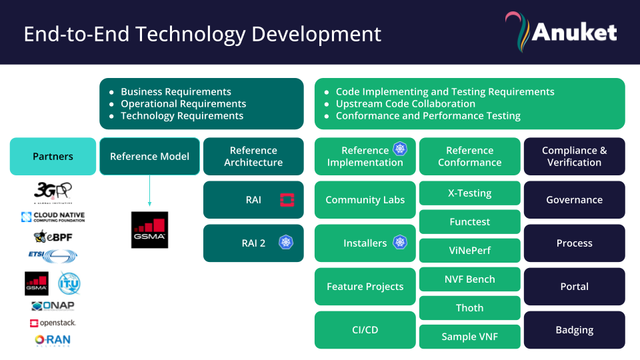
Anuket delivers a common model, standardized reference infrastructure specifications, and conformance and performance frameworks for virtualized and cloud native network functions, enabling faster, more robust onboarding into production, reducing costs and accelerating communications digital transformations.
1 Comment
Ramses Njasap
Hello,
I'm called Ramses and I'm new here. Please, can someone help onboard me?